



Pilot Aptitude Testing
Air Combat Centre conducts various pilot aptitude testing modules in Sydney for pre-screening, as well as testing similar to that used by the ADF (used by some airlines) for aircrew testing and selection. Results are available on the day of testing. This can be done either separately, or before or after the Get Your Wings program. Contact Air Combat Centre to book a testing date or for more information on pilot aptitude testing options.
Aptitude Tests Example
MENTAL DR
1. You are travelling at 100 knots. How far will you travel in 45 minutes?
a) 90nm
b) 120nm
c) 150nm
d) 75nm
e) 50nm
Answer 1: d
2. You fuel flow is 44 lbs per hour. How much fuel will you burn in 75 minutes?
a) 44lb
b) 33lb
c) 24lb
d) 12lb
e) 55lb
Answer 2: e
Psychological
The following questions can only be answered by you depending upon your character and experiences.
3. Which of the following least describes you?
a) Courteous
b) Curious
c) Patronizing
d) Studious
e) Thoughtful
4. Which of the following most describes you?
a) Courteous
b) Curious
c) Patronizing
d) Studious
e) Thoughtful
DOWNLOADABLE EXAMPLES
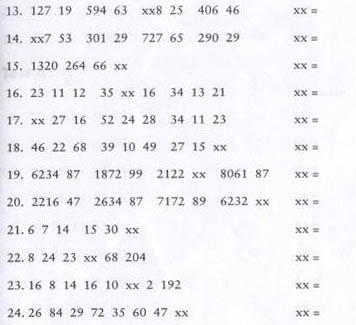
Many of these tests have a clock ticking in the background, to see if you can work with a distraction and also you will be time compressed, so work fast. Quality not quantity. For simplicity we have taken out the time element.
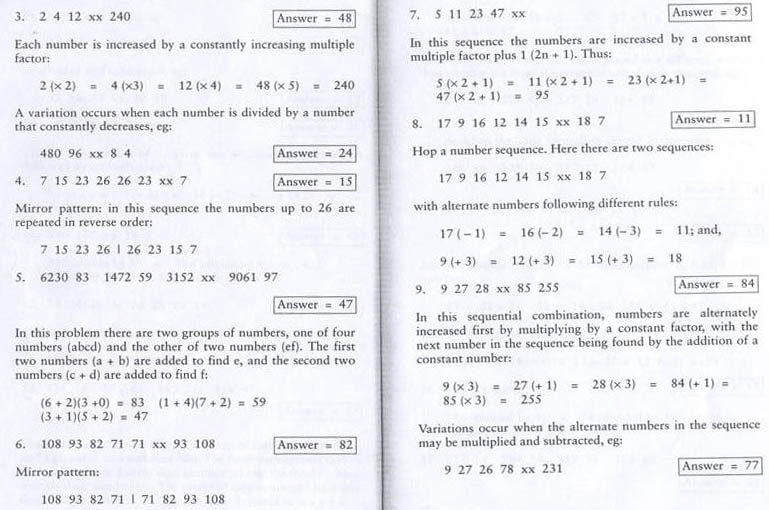
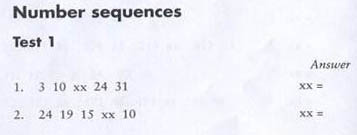
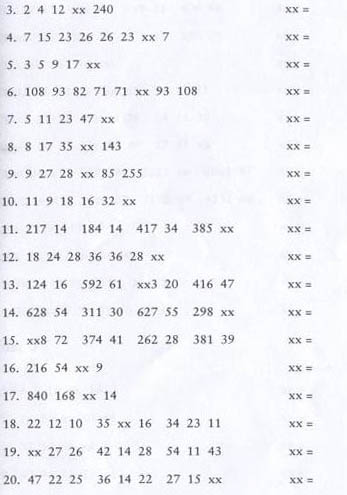
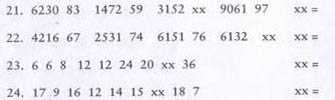
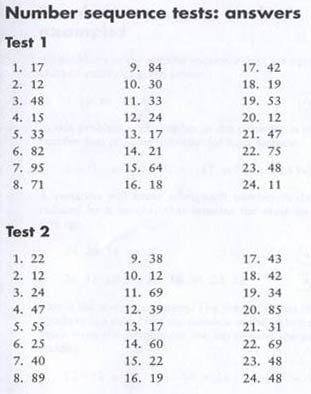
Number Sequences
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
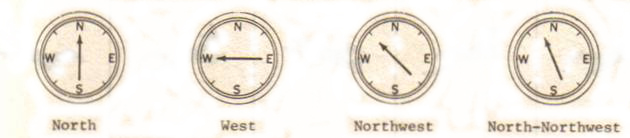
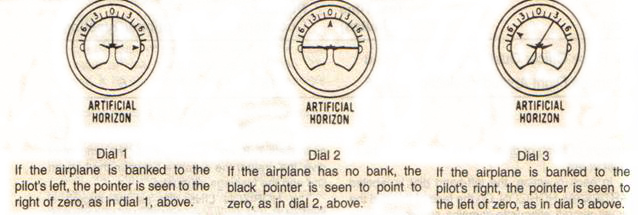
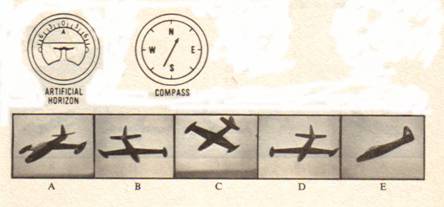
Spatial Orientation
Orientation: North into the page. Which silhouette best depicts the instrumentation displayed?
– Basic Aptitude Compass Explanation
{kind=link}
– Basic Aptitude Attitude Explanation
{kind=link}
{kind=link}
{kind=link}
{kind=link}
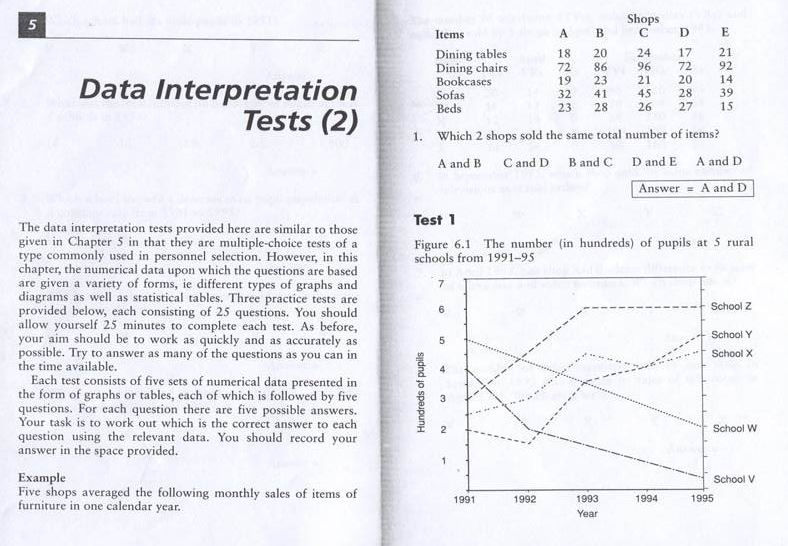
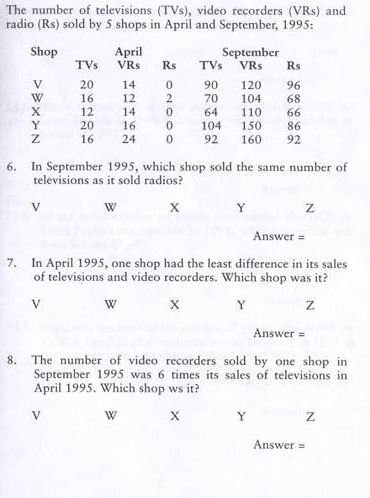
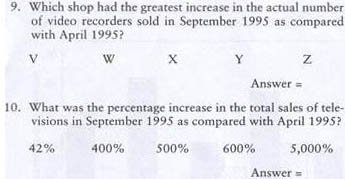
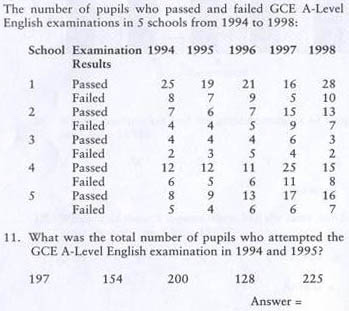
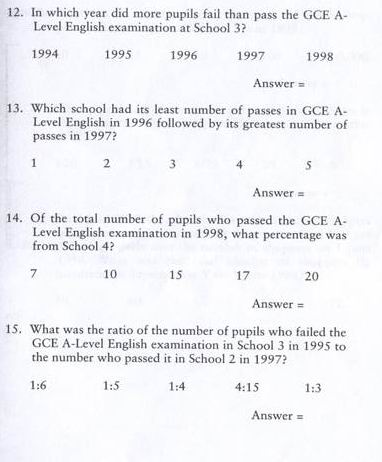
Mental Deduction and Reasoning
– Data Interpretation Worked Example & Test 1
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
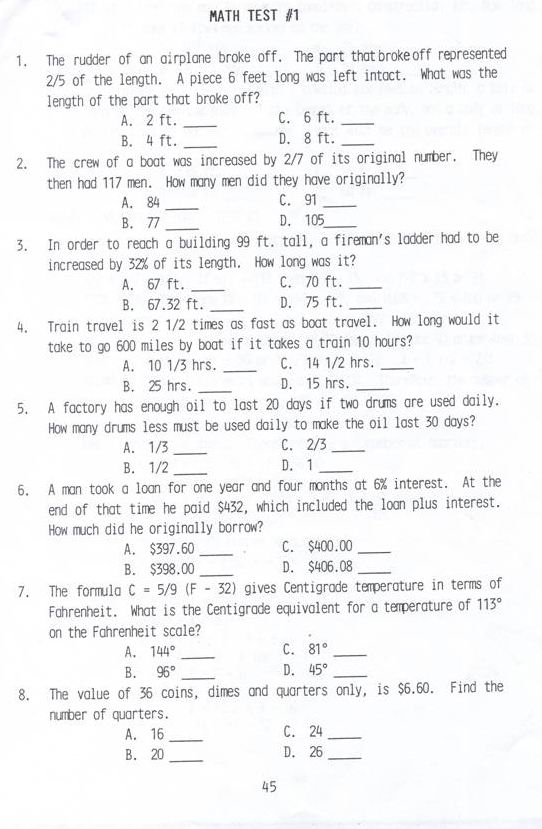
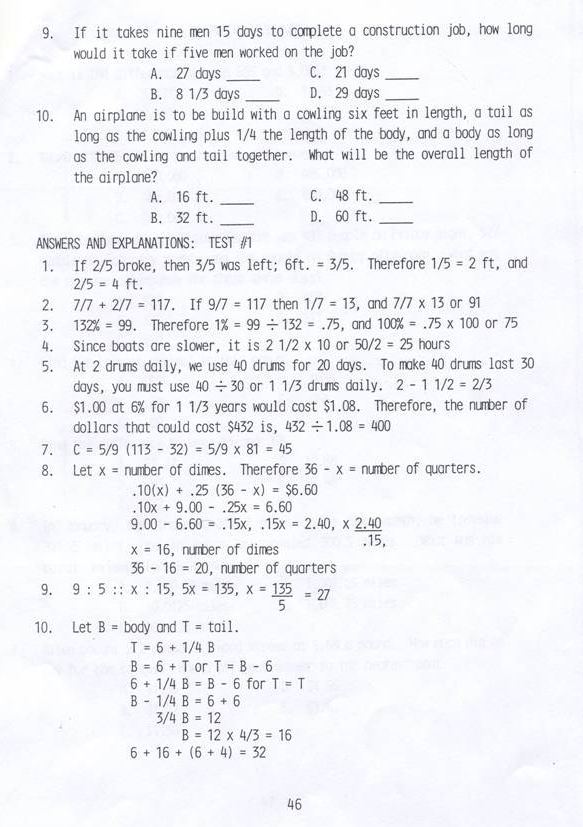
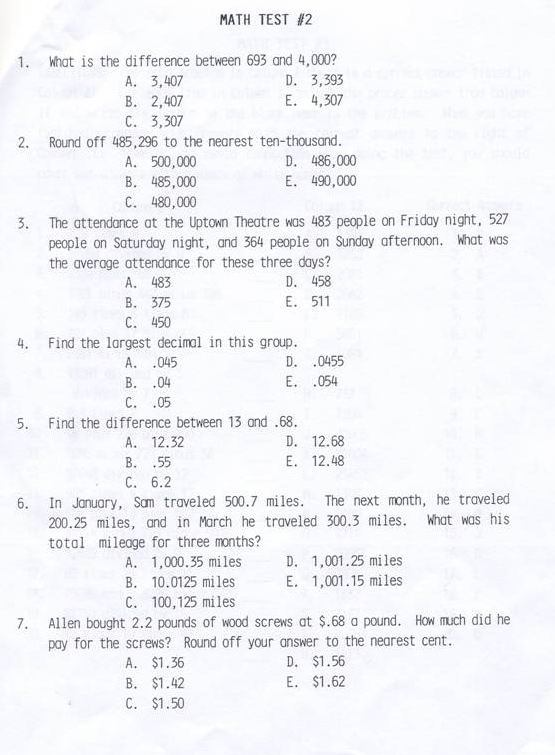
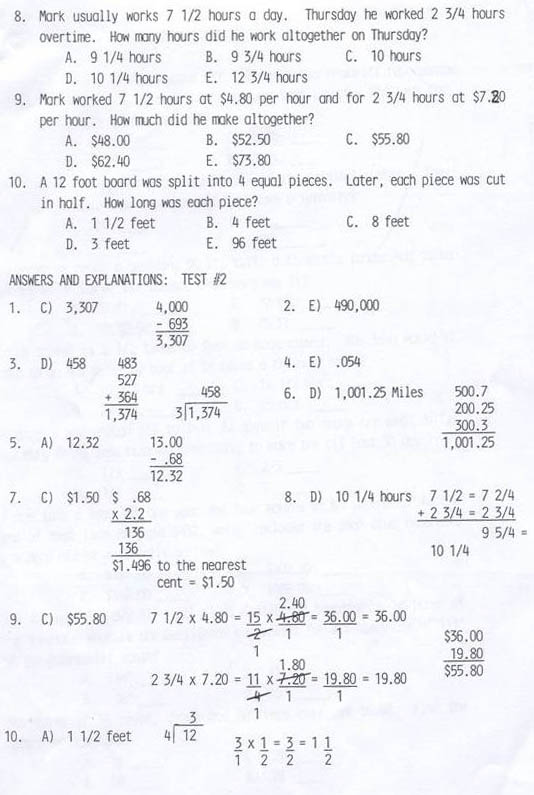
Mathematical Agility
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Here is a site that you may find useful produced by the UK based RAF. It has the sorts of questions that you could get at the ADF Pilot aptitude tests including a timer!
http://www.speeddistancetime.info/
More aptitude stuff to come…stay tuned!